Local Geometry and Differential Equations
Abraham D. Smith
San José State University
February 18, 2015
What is Geometry?




The study of shapes using properties
like length, angle, area, etc.
 \( \simeq \)
\( \simeq \)
 \( \simeq \)
\( \simeq \)
\( \simeq \)
\( \simeq \)
 \( \simeq \)
\( \simeq \)
Allowed by rotation:

\[ A=ab \]
\[ c^2 = 4 \left(\frac12 ab\right) + (b-a)^2 = 2ab + b^2 -2ab + a^2 = a^2 + b^2\]
What is Geometry?

The study of shapes using properties
that are unchanged by
rotation.

The study of shapes using properties
that are unchanged by
rotation.

But, what about this picture?
Maybe allow reflections, too.
Comparing different sizes is useful.
\[ \pi = \frac{A}{R^2} = \frac{C}{2R} \]
\( \overset{?}{\simeq} \)
\( \simeq \)
\( \overset{?}{\simeq} \)

the study of shapes using properties that are unchanged by rotations (and maybe reflection) (and maybe scaling)
|
 |
 |
|
| can | rotate | rotate, reflect | rotate, reflect, scale |
| get | angle, length, orient'n | angle, length | angle |
| name | \( SO(\mathbb{R}^2) \) | \( O(\mathbb{R}^2) \) | \( CO(\mathbb{R}^2) \) |
|
 |
 |
|
| can | rotate | rotate, reflect | rotate, reflect, scale |
| get | angle, length, orient'n | angle, length | angle |
| name | \( SO(\mathbb{R}^2) \) | \( O(\mathbb{R}^2) \) | \( CO(\mathbb{R}^2) \) |
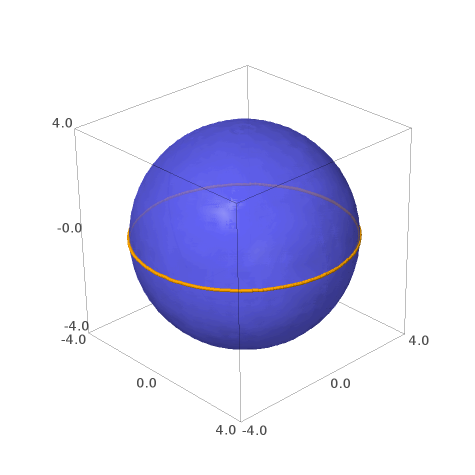
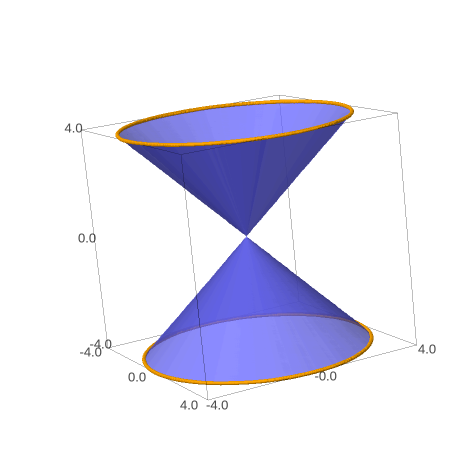
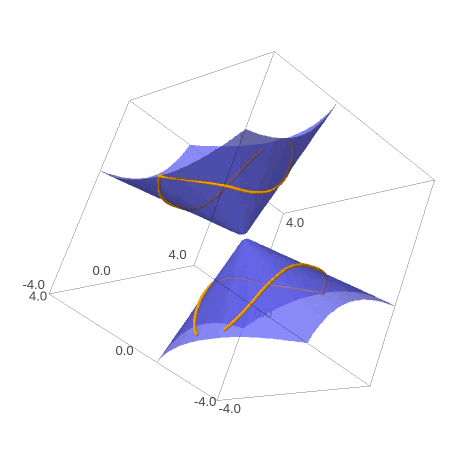
Other shapes give other geometries!
\[ x^2 + y^2 = 1\]

\[ xy = 1\]

\[ xy = 1, \text{(squish/stretch,but preserve area)}\]
Geometry is...
the study of shapes using properties that are unchanged by a family of transformations, \(G\) usually given as a matrix group.
| Actions | Name | Formal Definition |
|---|---|---|
| Rotations | \(SO(\mathbb{R}^n)\) | \( =\{ A : A^TA=I, \det(A)=1\} \subset GL \) |
| Rotations & Reflections | \(O(\mathbb{R}^n)\) | \( =\{ A : A^TA =I, \det(A)=\pm 1\} \subset GL\) |
| Rotations & Reflections & Scalings | \(CO(\mathbb{R}^n)\) | \( =\{ rA : A \in O(n), r \in \mathbb{R} \} \subset GL\) |
| Volume-preserving | \(SL(\mathbb{R}^n)\) | \( =\{ A : \det(A)=1\} \subset GL\) |
| All (linear) | \(GL(\mathbb{R}^n)\) | \( =\{ A : \det(A)\neq 0\}\) |
| \(\cdots\) | G | \( =\{ A : \cdots~\text{some condition}~\cdots \} \subset GL\) |
Is this enough to describe our world?
Lines might seem to be the shortest route nearby
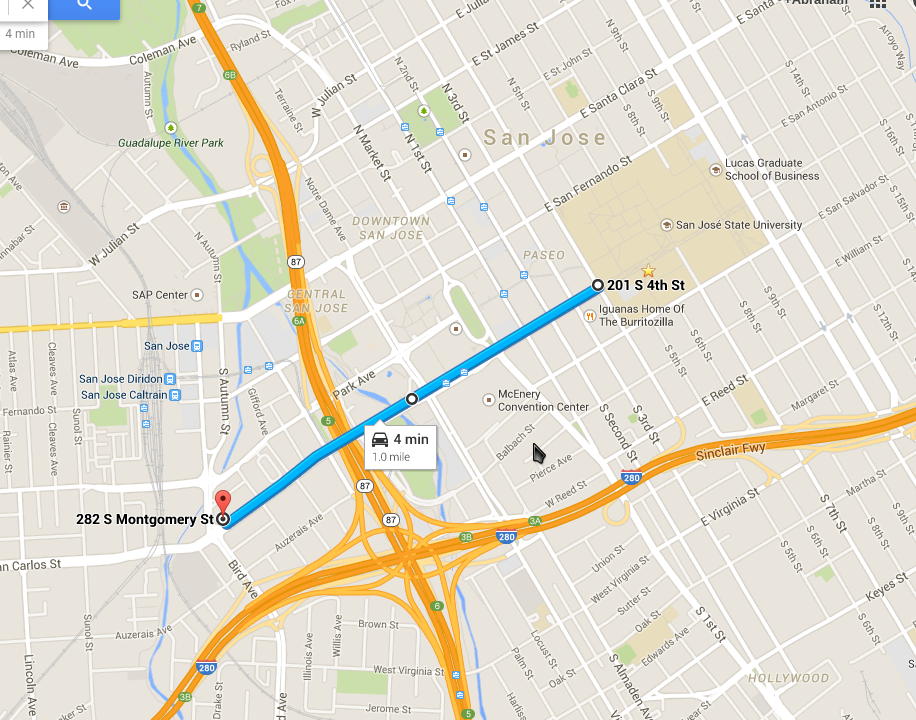
but not for long.

On Earth, lines are nonsense.

In the Universe, even light can't travel straight.
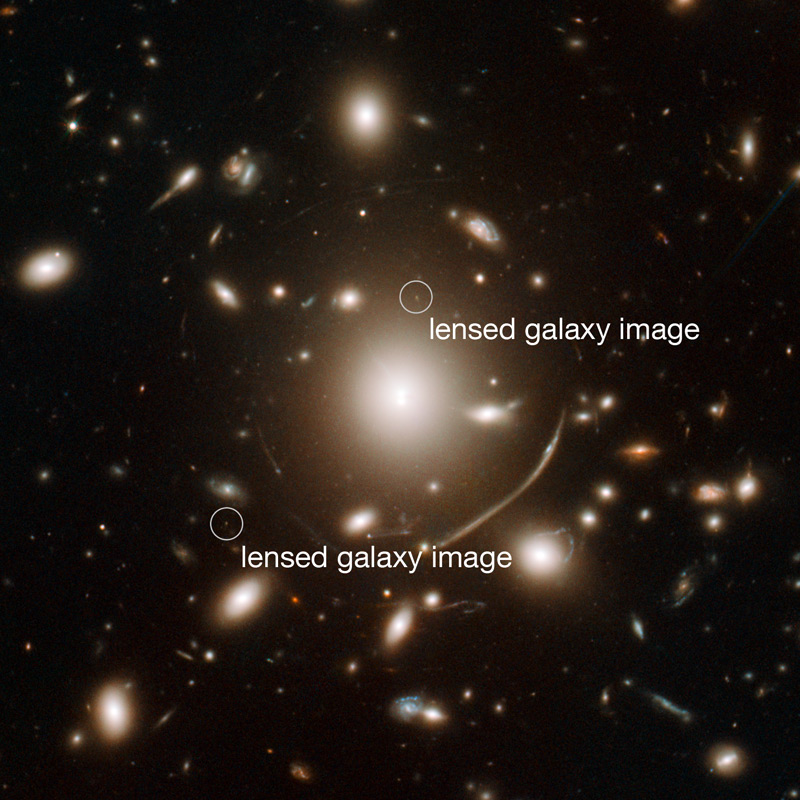
How can we reconcile these?
We need to make geometry local
We need to allow geometry to change.
You are heading for a comet.

You are closing toward a comet.
You are approaching a comet.
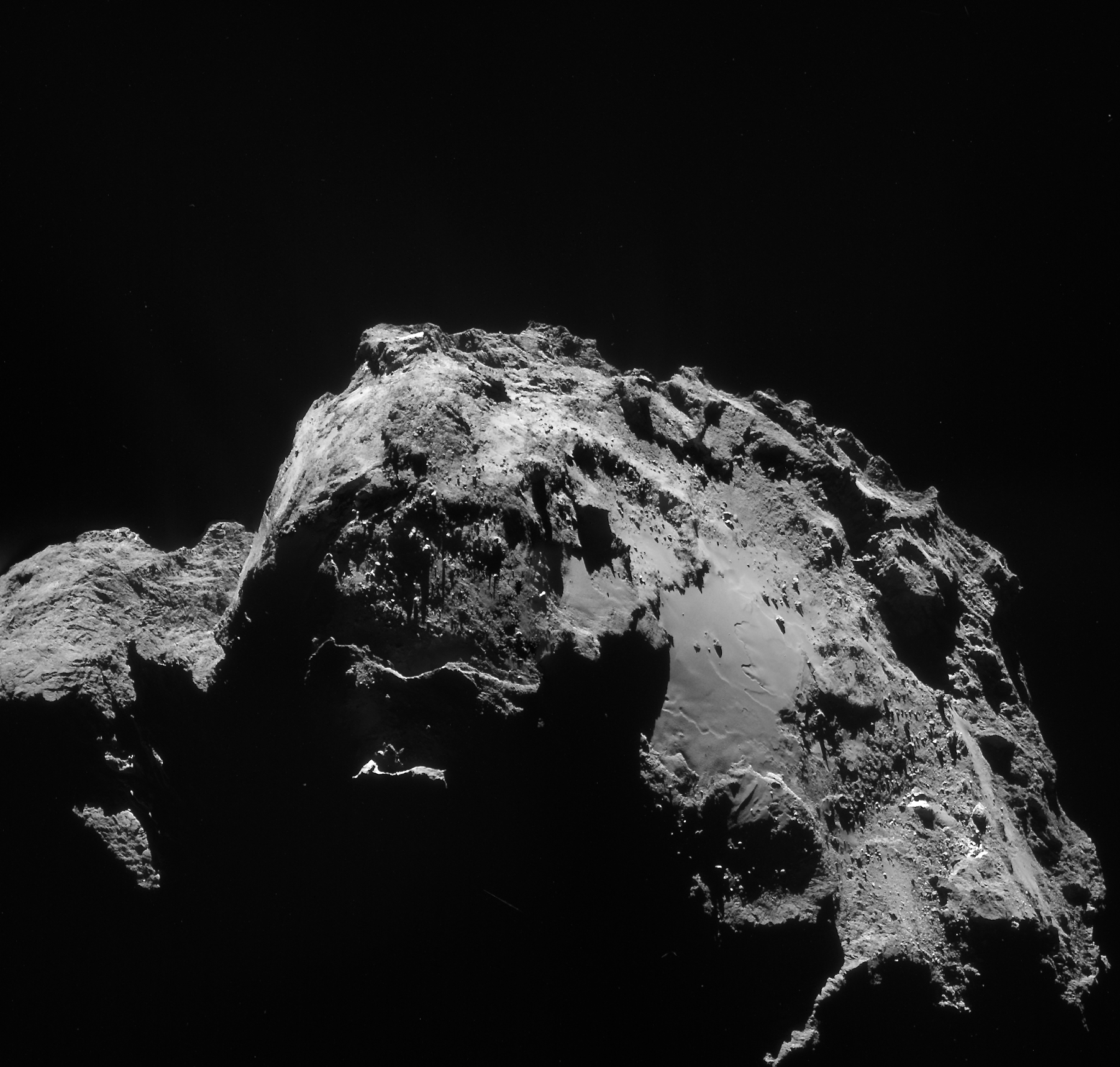
You are landing on a comet.
You are touching a comet.

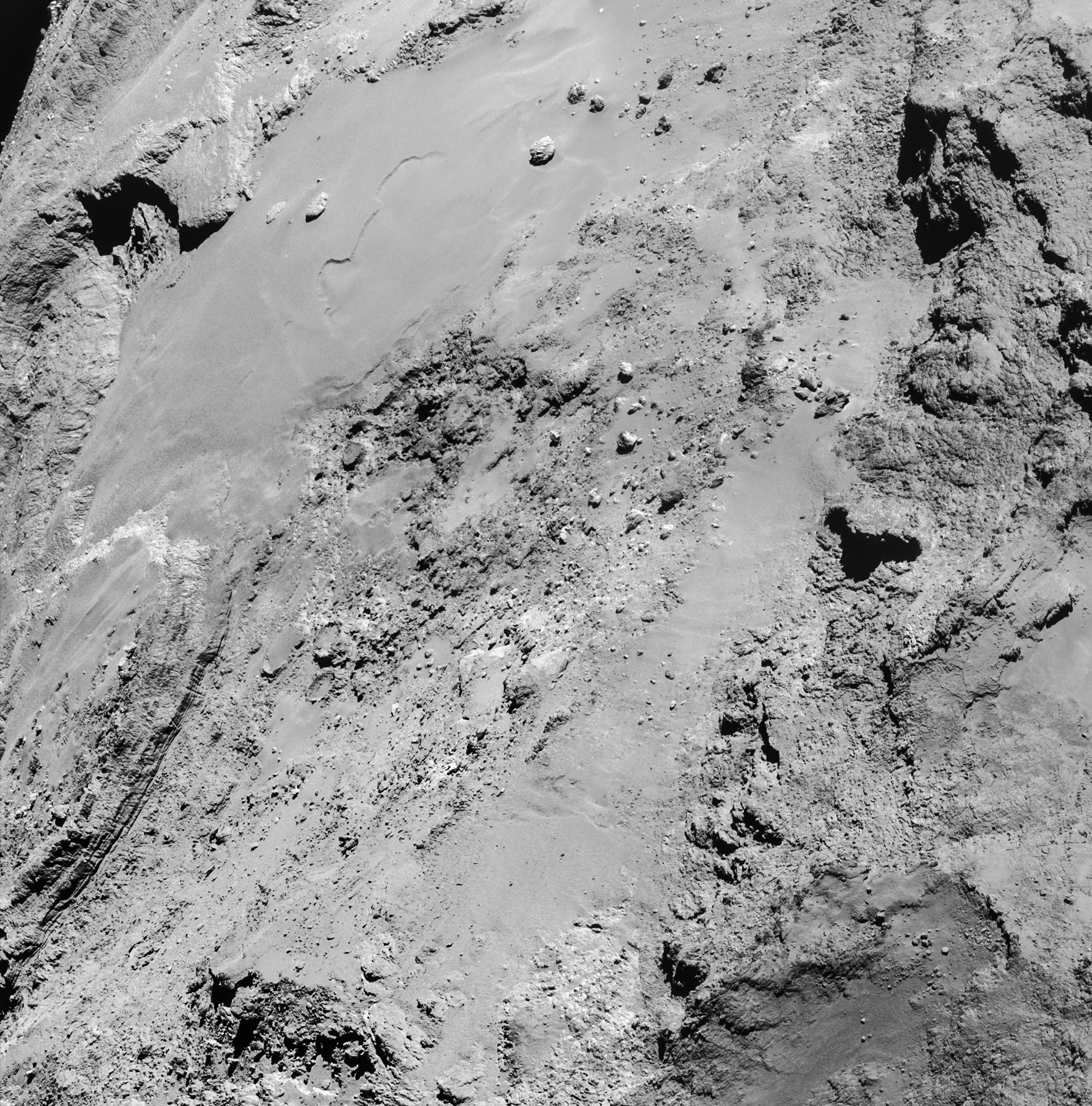
You have landed on comet \(K\) at location \(p\).
Near \(p\), comet \(K\) looks like \(\mathbb{R}^2\).
Can explore in two dimensions.


Near \(p\), comet \(K\) looks like \(\mathbb{R}^2\).
Can make a circle.

Near \(p\), comet \(K\) looks like \(\mathbb{R}^2\).
Can reach a
distance and measure angles.

Near \(p\), comet \(K\) looks like \(\mathbb{R}^2\).
Can rotate (and
reflect).

Defining local geometry

\(K\) is made of points like \(p\).

Each \( p \in K\) has a tangent plane \( T_p K\), approximates region near \(p\) by \( \mathbb{R}^2\)

Draw a circle in each \(T_p K\).

Each \(T_p K\) can be rotated/reflected individually.



General Approach:
- Work on \(K\) of dim \(n\)
- Each \(p \in K\) has a \(T_p K \cong \mathbb{R}^n\)
- Choose a shape \( \Sigma_p \subset T_p K\)
- or transformations \( G_p \) acting on \( T_p K\).
- (get the other for free)
This is a \(G\)-Structure on \(K\).
Have and
.
Choose or
.
What is a differential equation?
We know algebraic equations:
- equalities with unknown numbers
- “solve” means “find all numbers that make it true”
- Examples: \( x^2 + y^2 = 1 \) or \(xy=1\)
- Solutions: or
Differential equations:
- equalities with unknown functions
- “solve” means “find all functions that make it true”
- Example: \[ \frac{\mathrm{d}y}{\mathrm{d}x} = (y-x) \]
- \( \{ f:\mathbb{R}\to\mathbb{R} ~\text{such that}~ f'(x) = f(x)-x \ \text{for all $x$} \} \) = ???
 |
 |
| \( (7.5,6.5) \in K\) | \( \{ (\mathrm{d}x,\mathrm{d}y), \mathrm{d}y = -1 \mathrm{d}x\} \) |
 |
|
| \( p \in K\) | \( \Sigma_p \subset T_p K\) |
 |
 |
| \( \{(x,f(x))\} \subset K\) | \( \{\mathrm{d}y=f'(x)\mathrm{d}x\} \subset T_p K\) |
General Approach:
- Write a diff.eq. on \(K\) of dim \(n\)
- Each \(p \in K\) has a \(T_p K \cong \mathbb{R}^n\)
- diff.eq. specifies a shape \( \Sigma_p \subset T_p K\)
- so transformations \( G_p \) act on \( T_p K\) to preserve \(\Sigma_p\).
A differential equation gives a \(G\)-Structure on \(K\).
Have and
.
Get , so
.The Geometry of Geometry
Compute \(\Delta = B^2 - 4AC\):
|

|
|
Algebraic equations come in algebraic families.
Algebraic equations come in algebraic families.
\( \{ Ax^2 + Bxy + Cy^2 +Dx + Ey = F \} =\)
Differential equation \(=\) a choice of an algebraic
equation in each \( T_pK \)
What if we choose \(\Delta=B^2-4AC = 0\)?

Differential equations come in differential families!
Differential equations come in differential families!
What are the sub-types?

Thanks!
Document Credits:
- Desargues theorem image: public domain via Wikipedia
- Earth image: NASA
- p67 images: ESA
- slide tech: reveal.js, MathJax, TikZ/TeXLive
All other content: Abraham D. Smith, 2015.
 www.curieux.us/abe/talks/local_geometry_and_differential_equations
www.curieux.us/abe/talks/local_geometry_and_differential_equations